
본 포스팅은 구종만님의 블로그를 스크랩한 글임을 밝힙니다.
http://theyearlyprophet.com/heavy-light-decomposition.html
Heavy-Light Decomposition
Heavy-Light Decomposition @jongman 팔로우하기 트윗하기 [처음으로] [모든 글 보기] [같은 카테고리의 글 보기: 알고리즘] 작년에 1년동안 쉬면서 한 여러 가지 일 중 하나가, 오랜만에 다시 프로그래밍 대회에 참가하는 것이었다. 비록 연습만 열심히 하고 대회에 제대로 참가하진 못했지만, 최근 나온 문제들을 풀어볼 기회가 되어서 좋았다. 최근 문제 출제 경향은 과거에 비해 꽤 바뀌었음을 느꼈는데, 기존에 출제되지 않았던 테크닉들
theyearlyprophet.com
1/28- 코드 구현에는 성공했으나 BOJ에 문제를 제출하지는 못했습니다. 본 구현은 단방향그래프일 경우의 코드지만 제가 연습하고자 하는 BOJ문제들은 모두 양방향그래프를 조건으로 갖추고있어서.. 그냥 단방향을 양방향으로 고치기엔
코드가 무척이나 길고 이해하기힘들고 변수가 많고 까다롭고 그렇습니다. 좀 더 구현 연습을 한 후 저에게 맞는 방식으로 코드를 작성해 나가야겠습니다.
-------------------------------------------------------------------------------------------------------
N개의 정점을 가진 트리가 있다고 하자. 이 때 임의의 두 정점에 대해 이들을 잇는 경로는 O(N)개의 간선을 가진다. Heavy light decomposition은 트리의 간선들을 적절히 일자 경로인 "묶음"들로 잘라, 임의의 두 간선 사이 경로를 O(log N)개의 묶음으로 표현할 수 있게 해 준다. 이것을 세그먼트 트리 등의 일차원 자료 구조와 결합함으로써, 임의의 두 정점 사이의 경로에 대한 연산을 O(log^2N)에 할 수 있다.
개관
간단한 예제 문제를 들어 보자.
-------------------------------------------------------------------------------------------------------
https://algospot.com/judge/problem/read/NAVI
algospot.com :: NAVI
내비게이션 문제 정보 문제 알고스팟 국의 고속도로는 0부터 N-1까지의 번호가 매겨진 N개의 대도시를 연결하고 있다. 이 고속도로망의 가장 큰 특징은 고속도로들이 트리 형태를 갖는다는 것이다. 다시 말하면, 두 도시 간을 연결하는 경로는 항상 정확히 하나만 존재한다. 아래 그림은 13개의 도시를 연결하는 고속도로망의 예를 보여준다. 이 고속도로들은 공익을 위해 건설된 것이기 때문에 통행료가 아주 저렴해서, 고속도로를 한 번 탈 때마다 단 1원의 통행료만을
algospot.com
문제
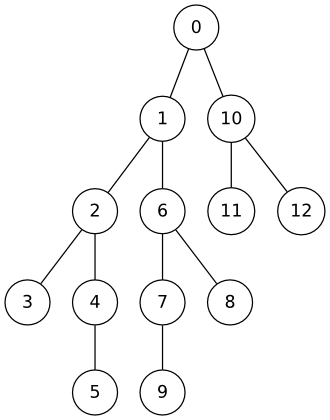
알고스팟 국의 고속도로는 0부터 N-1까지의 번호가 매겨진 N개의 대도시를 연결하고 있다. 이 고속도로망의 가장 큰 특징은 고속도로들이 트리 형태를 갖는다는 것이다. 다시 말하면, 두 도시 간을 연결하는 경로는 항상 정확히 하나만 존재한다. 아래 그림은 13개의 도시를 연결하는 고속도로망의 예를 보여준다.

이 고속도로들은 공익을 위해 건설된 것이기 때문에 통행료가 아주 저렴해서, 고속도로를 한 번 탈 때마다 단 1원의 통행료만을 내면 된다.
최근 세수가 부족해진 정부는 통행량에 따라 고속도로의 통행료를 동적으로 바꾸는 법안을 상정했다. 이 법안에 따르면, 교통량이 많을 때는 통행료를 올려서 교통량을 낮추는 효과를 볼 수 있다. 그러나 서민들의 거센 반대에 부딪힌 정부는 다음과 같은 타협안을 제시했다: 두 도시 간을 통행할 때는, 지나는 고속도로의 통행료 중 가장 비싼 한 군데의 통행료만을 내도 상관없다는 것이다.
예를 들어 위 그림에서 0번과 1번 도시 사이의 통행료가 10원, 1번과 2번 사이의 통행료가 15원, 2번과 3번 사이의 통행료가 7원이라면, 0번에서 3번까지 갈 때는 15원의 통행료만을 내면 된다.
서민들의 반대는 잦아들고 모두가 행복한 듯 했지만, 알고스팟 국에서 가장 잘 나가는 내비게이션, 박기사의 서버 개발을 담당하고 있는 대성이는 곤란한 상황에 처했다. 고속도로들의 통행료는 하루에도 수천번씩 바뀔 수 있기 때문에, 두 도시간의 통행료를 계산하기가 훨씬 어려워졌기 때문이다.
박기사의 서버는 통행료 변경 내역을 실시간으로 입력받으며, 중간 중간 두 도시 간의 통행료 계산을 요청받아 반환해야 한다. 이를 계산하는 프로그램을 작성해 대성이를 도와주자.
입력
입력에는 C(<=10)개의 테스트 케이스가 주어진다.
각 테스트 케이스의 첫 줄에는 도시의 수 N(2 <= N <= 50000)이 주어진다. N개의 도시는 트리 형태를 가지고 있으며, 0번 도시가 항상 트리의 루트가 된다.
다음 줄에는 N개의 정수로, 0번부터 N-1번까지 각 도시에 대해 부모 도시의 번호가 주어진다. 0번 도시는 루트이므로 부모 도시의 번호 대신 -1이 주어진다. 초기에 모든 고속도로의 통행료는 1원이다.
다음 줄에는 연산의 수 Q (1 <= Q <= 10,000)이 주어진다. 그 후 Q줄에 하나씩 연산이 주어지는데, 연산은 다음 두 형태 중 하나이다:
- update a b cost: a도시와 b도시를 연결하는 고속도로의 통행료를 cost원으로 갱신한다. (0 <= a, b < N, 1 <= cost <= 230)
- query a b: a도시와 b도시 간의 통행료를 계산하라.
출력
각 테스트 케이스마다, query 연산의 결과 통행료들을 모두 계산해 그들의 xor를 한 줄에 출력한다.
-------------------------------------------------------------------------------------------------------
가중치 간선을 갖는 트리가 있다. 문제는 다음의 두 가지 연산을 구현하는 것이다.
(이 문제는 여기에서 채점받을 수 있다.)
- Update(u, v, cost): 간선 (u, v) 의 가중치를 cost로 갱신한다.
- Query(u, v): 두 정점을 잇는 경로에 포함된 간선 중 최대 가중치를 반환한다.
이것을 구현하는 가장 간단한 방법은, Query가 호출될 때마다 두 정점 사이의 경로를 따라 걸으며 만나는 가중치의 최대값을 구하는 것이다. 두 정점 u, v사이의 경로는 두 정점의 LCA(최소 공통 조상, least common ancestor)로 올라가는 두 개의 경로로 분할할 수 있으므로, 다음과 같이 간단히 구현할 수 있다:
int parent[MAXN]; // 부모 정점의 번호. 루트라면 -1
int weight[MAXN]; // 부모 정점으로 가는 간선의 가중치
// u와 v의 최소 공통 조상(least common ancestor)을 반환한다.
int lca(int u, int v) {
...
}
// 간선 (u,v)의 가중치를 cost로 갱신한다.
void update(int u, int v, int cost) {
if(parent[u] == v) swap(u, v);
assert(parent[v] == u);
weight[v] = cost;
}
// u와 v를 잇는 간선 중 최대 가중치를 반환한다.
int query(int u, int v) {
int max_weight = -1;
int t = lca(u, v);
while(u != t) { max_weight = max(max_weight, weight[u]); u = parent[u]; }
while(v != t) { max_weight = max(max_weight, weight[v]); v = parent[v]; }
return max_weight;
}update()는 상수 시간에 동작한다. 그렇다면 query()의 시간 복잡도는 얼마일까? query()는 두 정점에서 LCA까지 가는 경로를 걸어 올라가므로, 시간 복잡도는 두 정점의 깊이에 비례한다고 하겠다. 허나 트리가 브랜치 하나 일렬로 쭉 늘어서 있다면 깊이는 $O(N)$이 된다. 이 문제의 제약 조건에서는 이것은 너무 느리다. 어떻게 하면 좋을까?
간선 분류
우리의 목적은 트리의 간선을 무거운 간선과 가벼운 간선으로 나누는 것이다. 무거운 간선이란 무엇일까? 한 정점의 무게를 해당 정점을 루트로 하는 서브트리에 속한 정점의 수라고 하자. 부모 u에서 자식 v로 가는 간선이 있을 때, v의 무게가 u의 절반 이상이라면 이 간선은 무거운 간선, 이외의 경우는 가벼운 간선이 된다.
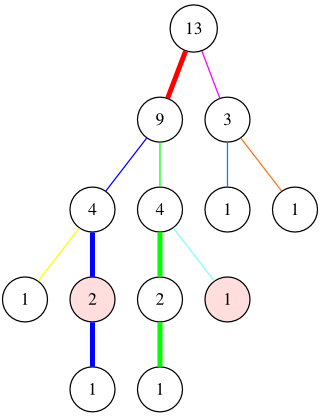
아까 링크했던 문제의 예제 데이터를 그림으로 그리면 아래와 같다.
각 서브트리의 무게를 구하고, 무거운 간선을 굵은 선으로 표현하면 다음과 같다.
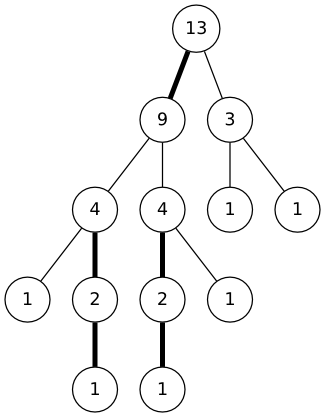
(이제 각 정점에는 해당 정점의 무게가 표시되어 있다는 점에 유의하자.) 몇 가지 사실을 눈치챌 수 있다:
- 사실 1: 한 정점에서 자손으로 내려가는 무거운 간선이 두개일 수는 없다. 두 자손의 무게가 각각 절반 이상이라면 모순이 되기 때문이다. (만약 자손이 둘 있는데 이들의 무게가 N으로 같다고 하더라도, 부모의 무게는 2N+1이므로 절반이 될 수 없다.)
- 사실 2: 가벼운 간선을 따라 부모에서 자식으로 내려가면 노드의 무게는 항상 절반 이상 줄어든다. 노드의 무게는 항상 1 이상이기 때문에, 따라서 루트에서 잎으로 가는 어떤 경로에도 가벼운 간선은 너무 많을 수 없다. 정확하게는 가벼운 간선의 수는 $O(\lg N)$개라는 것을 알 수 있다. 이 사실은 잠시 후 1차원 배열의 개수를 찾는 데 유용하게 쓰인다.
트리 분해
간선을 분류하고 나면, 트리의 간선들을 여러 개의 묶음으로 분해할 수 있다. 우선 인접한 무거운 간선들을 하나로 묶자. 이렇게 묶은 결과를 "무거운" 경로라고 부르자. 위에서 언급한 사실1에 의해, 이 결과는 항상 1자 경로가 된다. 위 그림에서 각 무거운 경로를 다음과 같이 구분할 수 있다.
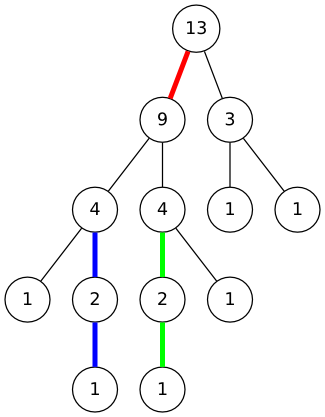
엄밀히 정의에는 어긋나지만, 편의상 무거운 경로의 맨 윗 정점에서 그 부모로 올라가는 간선들도 해당 무거운 경로에 포함시키기로 하자. 무거운 간선에 인접하지 않은 정점은 길이가 0인 경로라고 가정하면, 모든 간선이 정확히 하나의 무거운 경로에 포함되도록 할 수 있다. 다음 그림이 이와 같은 분해 결과를 보여준다.
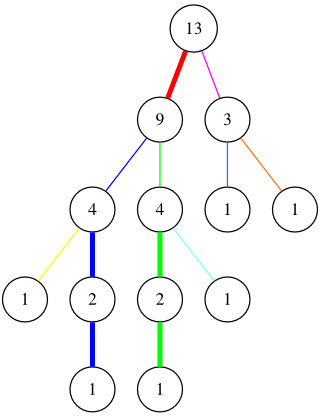
파란색과 녹색 무거운 경로의 최상위 정점에서 위로 올라가는 간선들이 각각 파란색과 녹색으로 색칠된 것에 유의하자. 그러면 모든 간선은 이제 정확히 하나의 무거운 경로에 속한다.
이제 각 무거운 경로들을 잘라내 일렬로 펼쳐 보자. 아래 그림을 얻을 수 있다.
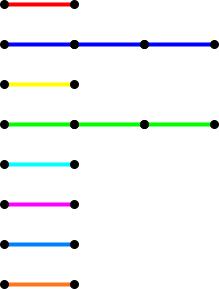
이 때 임의의 두 정점 u, v를 잇는 경로는 이 무거운 경로들의 일부들을 모아 표현할 수 있다. 예를 들어
이 그림에서 분홍색으로 표시된 두 정점 간의 경로는 파란색 경로의 일부와 초록색 경로의 일부, 그리고 하늘색 경로를 모아 표현할 수 있다.
이 때 임의의 두 정점 u, v를 잇는 경로에는 몇 개의 무거운 경로가 포함될까? u, v의 최소 공통 조상이 t라고 하자. t에서 u로 트리를 따라 내려가다 보면, 무거운 경로가 끊어지는 것은 가벼운 간선을 만날 때 뿐이다. 그런데 위에서 언급한 사실2에 의해, 가벼운 간선은 lg N개 이상 만날 수 없다. 따라서 u-v를 잇는 경로 상에 있는 무거운 경로의 수는 최대 2lg N라는 사실을 알게 된다.
HLD로 문제 풀기
이 점을 깨닫고 나면 앞에서 제시한 문제를 어떻게 풀어야 할지 알 수 있다. 먼저 트리를 무거운 경로들의 집합으로 쪼갠다. 각 무거운 경로들은 1자 경로이니, 각 경로마다 하나의 구간 트리를 만들어 각 간선의 가중치를 저장한다. 그러면 이 문제에서 지원해야 하는 두 개의 연산들을 다음과 같이 수행할 수 있다.
- Update 연산: 해당 간선이 포함된 무거운 경로를 찾고, 이 경로에서 해당 간선이 몇 번째로 오는지를 찾아낸다. 그리고 나면 해당 무거운 경로를 표현하는 구간 트리의 해당 원소를 갱신해 주면 된다.
- Query 연산: 두 정점을 잇는 경로를 무거운 경로의 조각들로 쪼갠다. 이 조각들은 이렇게 생겼을 것이다: [무거운 경로 번호, 경로 내에서 첫 번째 간선의 번호, 경로 내에서 마지막 간선의 번호]. 조각들을 순회하며 만들어 둔 구간 트리를 이용해 해당 조각의 최대치를 찾고, 이 중 최대치를 반환한다.
HLD 계산하기
HLD 결과를 어떻게 저장해야 할까? 다양한 방법이 있겠지만, 여기에서 제공하는 예제 구현은 트리가 주어질 때 다음과 같은 값들을 계산한다.
- 각 정점의 깊이와, 해당 정점을 루트로 하는 서브트리의 크기
- 무거운 경로의 목록: 각 무거운 경로마다, 경로에 포함된 정점들의 목록을 트리의 위쪽에서부터 저장한다.
- 각 정점에 대해, 부모로 가는 간선이 속한 무거운 경로의 번호
이것을 다음과 같이 선언할 수 있다.
// 입력으로 주어지는 값들
// ======================
int n; // 정점의 수
int parent[MAXN]; // 각 정점에 대해 부모의 번호를 저장한다. 루트는 -1
vector<int> children[MAXN]; // 각 정점마다 자식 정점의 목록을 저장한다.
// HLD가 계산하는 값들
// ===================
int subtree_size[MAXN]; // 해당 정점을 루트로 하는 서브트리의 크기 (= 정점의 무게)
int depth[MAXN]; // 트리에서 해당 정점의 깊이. 루트의 깊이는 0.
// 각 무거운 경로마다, 경로에 포함된 정점의 목록. 무거운 경로 맨 위에서 그
// 선조로 가는 가벼운 간선을 포함한다.
vector<vector<int> > heavy_paths;
// 이 정점에서 부모로 가는 간선을 포함된 무거운 경로의 번호.
// heavy_paths 내에서의 인덱스를 가리킨다.
vector<int> heavy_path_index;임의의 간선을 가리키기 위해 두 정점 중 자손의 번호를 사용한다는 데 유의하자. 부모에서 자손으로 가는 간선은 여러 개가 있을 수 있지만, 한 자손에서 부모로 가는 간선의 번호는 유일하기 때문에 자손의 번호를 이용하면 간선과 1:1 관계를 쉽게 유지할 수 있다.
HLD를 계산하는 간단한 방법은 루트에서 시작해 너비 우선 탐색을 하며, 각 경로를 만들어 나가는 것이다. 너비 우선 탐색이 정점을 방문할 때마다, 이 정점에서 부모로 올라가는 간선을 어디에 추가할지를 결정하면 된다. 이 간선이 무겁다면, 부모에서 끝나는 무거운 경로의 맨 뒤에 추가해 주면 되고, 가볍다면 이 간선에서 시작하는 무거운 경로를 새로 만들면 된다. 이와 같은 구현을 다음 코드에서 볼 수 있다.
// depth[]와 subtree_size[]는 이미 계산되어 있다고 가정한다.
void heavy_light_decomposition(int root) {
// 초기화
heavy_paths.clear();
heavy_path_index.resize(n, -1);
// 너비 우선 탐색을 하며 heavy_paths와 heavy_path_index를 계산한다.
queue<int> q;
q.push(root);
while(!q.empty()) {
int here = q.front();
q.pop();
for(int child: children[here])
q.push(child);
// here에서 자신의 부모로 올라가는 간선을 적절한 heavy_paths에 추가하자.
// 우선 here가 트리의 루트라 부모로 올라가는 간선이 없는 경우는 무시한다.
if(here == root) continue;
int p = parent[here];
// here에서 p로 올라가는 간선은 어떤 heavy_paths에 들어가야 할까?
if(subtree_size[here] * 2 >= subtree_size[p] && p != root) {
// 1. 이 간선이 무겁다면, 부모에서 끝나는 무거운 경로의 맨 끝에 들어간다.
// (예외: 부모가 루트인 경우에는 부모에서 끝나는 무거운 경로가 아직
// 없으므로 새 무거운 경로를 만들어야 한다.)
int parent_path_index = heavy_path_index[p];
heavy_paths[parent_path_index].push_back(here);
heavy_path_index[here] = parent_path_index;
}
else {
// 2. 이 간선이 가볍다면, 이 간선으로 시작하는 새 무거운 경로를 만든다.
heavy_path_index[here] = heavy_paths.size();
heavy_paths.push_back(vector<int>(2));
heavy_paths.back()[0] = p;
heavy_paths.back()[1] = here;
}
}
}구간 트리 만들기
이렇게 트리를 무거운 경로들로 분리하고 나면, 각 경로를 순회하며 각 경로에 포함된 간선의 길이에 해당하는 구간 트리를 만든다.
// 각 무거운 경로에 해당하는 구간 트리. segment_trees[i]는 heavy_paths[i]에
// 대응된다.
vector<SegmentTree> segment_trees;
void initialize_trees() {
segment_trees.clear();
segment_trees.reserve(heavy_paths.size());
// 각 무거운 경로마다 구간 트리를 만들고 모든 간선에 대해 값을 1로 지정한다.
for(const auto& path: heavy_paths) {
// 경로에 포함된 정점의 개수가 m개일 때, 간선의 개수는 m-1개이다.
int m = path.size();
segment_trees.push_back(SegmentTree(m - 1));
for(int i = 0; i < m-1; ++i)
segment_trees.back().update(i, 1);
}
}Update 연산의 구현
Update 연산을 구현하는 것은 간단하다. 우선 해당 간선이 포함된 무거운 경로의 번호를 찾고, 경로 내에서 이 간선이 몇 번째인지 찾는다. 우리는 경로 중 가장 위에 있는 간선을 0번으로 하고, 아래로 내려오며 번호를 매기기로 하자. 이렇게 하면 경로 중 가장 위에 있는 정점의 깊이를 이용해 쉽게 간선의 번호를 얻고, 구간 트리를 업데이트할 수 있다.
// v에서 그 부모로 올라가는 간선은 이 무거운 경로에서 몇 번째의 간선일까?
// 이 경로의 맨 위에 있는 정점의 깊이와 부모의 깊이를 비교하면 쉽게 알 수 있다.
int find_edge_in_path(int path_index, int v) {
int top_of_path = heavy_paths[path_index][0];
return depth[parent[v]] - depth[top_of_path];
}
void update(int u, int v, int cost) {
// 항상 u가 v의 부모이도록 하자.
if(parent[u] == v) swap(u, v);
assert(parent[v] == u);
// (u,v) 가 속한 경로의 번호는?
int path_index = heavy_path_index[v];
// (u,v)는 이 경로에서 몇 번째 간선일까?
int index_in_path = find_edge_in_path(path_index, v);
// 이 경로에 대응되는 구간 트리의 해당 원소를 갱신한다.
segment_trees[path_index].update(index_in_path, cost);
}
Query 연산의 구현
흥미로운 부분은 Query 연산이다. 우선 구현을 간단하게 하기 위해, u와 v 사이의 경로를 최소 공통 선조 t에서 쪼개자. 그리고 각각의 조각들에 대해 계산한 뒤 최대치를 구하면, 실제로 구현할 때는 항상 한 정점이 다른 정점의 조상이라고 가정하고 코드를 짤 수 있다.
아래 코드에서 query는 두 정점의 최소 공통 선조 t를 구한 뒤, query_topdown을 이용해 두 경로 u~t와 t~v의 최대치를 각각 찾는다.
// u와 v를 잇는 경로 중 최대값을 반환한다.
int query(int u, int v) {
int t = lca(u, v);
return max(query_topdown(t, u), query_topdown(t, v));
}query_topdown은 어떻게 구현할까? 만약 이 두 정점 사이의 경로가 하나의 무거운 경로로 구성되어 있다면 구간 트리를 이용해 간단히 답을 구할 수 있을 것이다. 이외의 경우에는, v에서 u를 만날 때까지 트리를 따라 올라가며 최대치를 찾는다. 이 때, 물론 한 칸씩 올라가는 것이 아니라, 한 번마다 무거운 경로를 하나씩 떼어낸다. v에서 parent[v]로 올라가는 것이 아니라, 이 간선이 속한 무거운 경로의 맨 윗점으로 올라가는 것을 반복하면 된다. 물론 이 때, 구간 트리를 이용해 떼어낸 부분 중의 최대치를 구할 수 있다.
// u에서 v로 내려가는 경로 중 최대값을 반환한다.
int query_topdown(int u, int v) {
// u와 v가 같다면 경로에는 아무 간선도 포함되어 있지 않다.
if(u == v) return -1;
// 만약 u와 v가 같은 무거운 경로에 속한다면 구간 트리로 해결 가능
if(heavy_path_index[u] == heavy_path_index[v]) {
int path_index = heavy_path_index[u];
// u에서 그 부모로 올라가는 간선은 [u,v] 구간에 포함되지 않고,
// 그 다음 간선부터 포함되므로 first_edge에 1을 더해 준다.
int first_edge = find_edge_in_path(path_index, u) + 1;
int last_edge = find_edge_in_path(path_index, v);
return segment_trees[path_index].query(first_edge, last_edge);
}
// v에서 부모로 올라가는 간선이 포함된 무거운 경로의 맨 위 정점까지 올라간다.
int path_index = heavy_path_index[v];
int top_of_path = heavy_paths[path_index][0];
// v == top_of_path 인 경우는 없다. 왜일까?
assert(top_of_path != v);
int last_edge = find_edge_in_path(path_index, v);
return max(query_topdown(u, top_of_path),
segment_trees[path_index].query(0, last_edge));
}
위 코드는 무거운 경로를 하나 떼낸 뒤, 남는 부분의 최대치를 구하기 위해 재귀호출을 이용한다.
최소 공통 조상 찾기
query는 내부적으로 두 정점의 최소 공통 조상을 반환하는 함수인 lca()를 반환한다. 이 함수를 구현하는 방법에는 여러 가지가 있지만, 그 중 비교적 간단한 것은 다음과 같은 배열을 이용하는 것이다.
exp_ancestor[i][j] = 정점 $i$에서 부모로 가는 연결을 2^j번 따라갔을 때 만나는 정점의 번호
이 배열은 깊이 우선 탐색을 하면서 간단히 계산할 수 있고, 이를 이용하면 O(lg N) 시간만에 두 정점의 최소 공통 조상을 찾을 수 있다. 자세한 것은 아래 소스 코드를 참조하자.
시간 복잡도 분석
임의의 두 정점 사이의 경로는 O(lg N)개의 무거운 경로들로 나눠질 수 있다. 각 경로에 대해 구간 트리의 연산은 전부 O(lg N)의 시간이 걸리므로, 모든 구간 트리에 대해 연산하는 시간은 O(lg^2)이 된다.
전체 소스 코드
다음은 이 문제를 해결하는 예제 C++ 코드이다.
using namespace std;
struct SegmentTree {
struct SegmentTreeNode {
int first, last; // 이 노드가 덮는 구간은 [first, last]이다.
int max_value; // 이 구간의 최대값
SegmentTreeNode *left, *right;
SegmentTreeNode(int first, int last): first(first), last(last), max_value(-1) {
if(first != last) {
int mid = (first + last) / 2;
left = new SegmentTreeNode(first, mid);
right = new SegmentTreeNode(mid+1, last);
}
}
void update(int pos, int value) {
// 터미널 노드인 경우 값을 바로 업데이트
if(first == last)
max_value = value;
// 아닌 경우 적절한 가지에 값을 전파하고 구간 최대값을 업데이트
else {
if(pos <= (first + last) / 2)
left->update(pos, value);
else
right->update(pos, value);
max_value = max(left->max_value, right->max_value);
}
}
int query(int lo, int hi) {
// [lo,hi]와 [first,last]의 교집합이 없는 경우
if(hi < first || last < lo) return -1;
// [lo,hi]가 [first,last]를 포함하는 경우
if(lo <= first && last <= hi) return max_value;
// 이외의 경우 각각 나눠 최대값 찾고, 최대치를 반환
return max(left->query(lo, hi), right->query(lo, hi));
}
};
SegmentTreeNode* root;
SegmentTree(int n): root(new SegmentTreeNode(0, n-1)) { }
// pos위치의 값을 value로 바꾼다.
void update(int pos, int value) { root->update(pos, value); }
// [lo, hi] 범위의 값 중 최대값을 구한다.
int query(int lo, int hi) { return root->query(lo, hi); }
};
const int MAXN = 50000;
// 입력으로 주어지는 값들
// ======================
int n; // 정점의 수
int parent[MAXN]; // 각 정점에 대해 부모의 번호를 저장한다. 루트는 -1
vector<int> children[MAXN]; // 각 정점마다 자식 정점의 목록을 저장한다.
// HLD가 계산하는 값들
// ===================
int subtree_size[MAXN]; // 해당 정점을 루트로 하는 서브트리의 크기 (= 정점의 무게)
int depth[MAXN]; // 트리에서 해당 정점의 깊이. 루트의 깊이는 0.
// 각 무거운 경로마다, 경로에 포함된 정점의 목록. 무거운 경로 맨 위에서 그
// 선조로 가는 가벼운 간선을 포함한다.
vector<vector<int> > heavy_paths;
// 이 정점에서 부모로 가는 간선을 포함된 무거운 경로의 번호.
// heavy_paths[] 의 인덱스를 가리킨다.
vector<int> heavy_path_index;
// exp_ancestor[i][j] = i에서 부모로 가는 간선을 2^j번 따라갔을 때 나오는 정점의
// 번호. lca() 를 위해 계산해 둔다.
vector<int> exp_ancestor[MAXN];
// 문제를 풀기 위해 계산하는 값들
// ==============================
// 각 무거운 경로에 해당하는 구간 트리. segment_trees[i]는 heavy_paths[i]에
// 대응된다.
vector<SegmentTree> segment_trees;
// HLD의 구현
// ==========
void dfs(int here) {
subtree_size[here] = 1;
// exp_ancestor[here]를 계산한다.
exp_ancestor[here] = vector<int>(1, parent[here]);
for(int log_jump = 0; ; ++log_jump) {
// 2^log_jump번 올라가 만난 정점
int arrived = exp_ancestor[here][log_jump];
// 2^log_jump번 더 올라갈 수 없다면 종료
if(exp_ancestor[arrived].size() <= log_jump) break;
// 여기서 2^log_jump번 더 올라가면 2^(log_jump+1)번 올라간 셈이 된다.
int next = exp_ancestor[arrived][log_jump];
exp_ancestor[here].push_back(next);
}
for(int child: children[here]) {
depth[child] = depth[here] + 1;
dfs(child);
subtree_size[here] += subtree_size[child];
}
}
// depth[]와 subtree_size[]는 이미 계산되어 있다고 가정한다.
void heavy_light_decomposition(int root) {
// 초기화
heavy_paths.clear();
heavy_path_index.resize(n, -1);
// 너비 우선 탐색을 하며 heavy_paths와 heavy_path_index를 계산한다.
queue<int> q;
q.push(root);
while(!q.empty()) {
int here = q.front();
q.pop();
for(int child: children[here])
q.push(child);
// here에서 자신의 부모로 올라가는 간선을 적절한 heavy_paths에 추가하자.
// 우선 here가 트리의 루트라 부모로 올라가는 간선이 없는 경우는 무시한다.
if(here == root) continue;
int p = parent[here];
// here에서 p로 올라가는 간선은 어떤 heavy_paths에 들어가야 할까?
if(subtree_size[here] * 2 >= subtree_size[p] && p != root) {
// 1. 이 간선이 무겁다면, 부모에서 끝나는 무거운 경로의 맨 끝에 들어간다.
// (예외: 부모가 루트인 경우에는 부모에서 끝나는 무거운 경로가 아직
// 없으므로 새 무거운 경로를 만들어야 한다.)
int parent_path_index = heavy_path_index[p];
heavy_paths[parent_path_index].push_back(here);
heavy_path_index[here] = parent_path_index;
}
else {
// 2. 이 간선이 가볍다면, 이 간선으로 시작하는 새 무거운 경로를 만든다.
heavy_path_index[here] = heavy_paths.size();
heavy_paths.push_back(vector<int>(2));
heavy_paths.back()[0] = p;
heavy_paths.back()[1] = here;
}
}
}
void initialize_trees() {
segment_trees.clear();
segment_trees.reserve(heavy_paths.size());
// 각 무거운 경로마다 구간 트리를 만들고 모든 간선에 대해 값을 1로 지정한다.
for(const auto& path: heavy_paths) {
// 경로에 포함된 정점의 개수가 m개일 때, 간선의 개수는 m-1개이다.
int m = path.size();
segment_trees.push_back(SegmentTree(m - 1));
for(int i = 0; i < m-1; ++i)
segment_trees.back().update(i, 1);
}
}
int lca(int u, int v) {
// 편의를 위해, u와 v의 깊이가 같거나 v가 더 아래 있다고 가정한다.
if(depth[u] > depth[v]) swap(u, v);
// 우선 u와 v의 깊이가 다르면 같아질 때까지 v를 올린다.
int diff = depth[v] - depth[u];
for(int i = 0; (1<<i) <= diff; ++i)
if(diff & (1<<i))
v = exp_ancestor[v][i];
// 만약 이 때 u == v라면 u가 v의 선조.
if(u == v) return u;
// u와 v가 같아지지 않는 한도 내에서 최대한 위로 올라간다.
for(int i = exp_ancestor[u].size()-1; i >= 0; --i)
if(i < exp_ancestor[u].size() && exp_ancestor[u][i] != exp_ancestor[v][i]) {
u = exp_ancestor[u][i];
v = exp_ancestor[v][i];
}
// 위 루프가 종료하면 u와 v는 LCA 바로 아래 위치하게 된다.
return exp_ancestor[u][0];
}
void read_input() {
for(int i = 0; i < MAXN; ++i) children[i].clear();
cin >> n;
for(int here = 0; here < n; ++here) {
int par;
cin >> par;
parent[here] = par;
if(par != -1) children[par].push_back(here);
}
}
// v에서 그 부모로 올라가는 간선은 이 무거운 경로에서 몇 번째의 간선일까?
// 이 경로의 맨 위에 있는 정점의 깊이와 부모의 깊이를 비교하면 쉽게 알 수 있다.
int find_edge_in_path(int path_index, int v) {
int top_of_path = heavy_paths[path_index][0];
return depth[parent[v]] - depth[top_of_path];
}
void update(int u, int v, int cost) {
// 항상 u가 v의 부모이도록 하자.
if(parent[u] == v) swap(u, v);
assert(parent[v] == u);
// (u,v) 가 속한 경로의 번호는?
int path_index = heavy_path_index[v];
// (u,v)는 이 경로에서 몇 번째 간선일까?
int index_in_path = find_edge_in_path(path_index, v);
// 이 경로에 대응되는 구간 트리의 해당 원소를 갱신한다.
segment_trees[path_index].update(index_in_path, cost);
}
// u에서 v로 내려가는 경로 중 최대값을 반환한다.
int query_topdown(int u, int v) {
// u와 v가 같다면 경로에는 아무 간선도 포함되어 있지 않다.
if(u == v) return -1;
// 만약 u와 v가 같은 무거운 경로에 속한다면 구간 트리로 해결 가능
if(heavy_path_index[u] == heavy_path_index[v]) {
int path_index = heavy_path_index[u];
// u에서 그 부모로 올라가는 간선은 [u,v] 구간에 포함되지 않고,
// 그 다음 간선부터 포함되므로 first_edge에 1을 더해 준다.
int first_edge = find_edge_in_path(path_index, u) + 1;
int last_edge = find_edge_in_path(path_index, v);
return segment_trees[path_index].query(first_edge, last_edge);
}
// v에서 부모로 올라가는 간선이 포함된 무거운 경로의 맨 위 정점까지 올라간다.
int path_index = heavy_path_index[v];
int top_of_path = heavy_paths[path_index][0];
// v == top_of_path 인 경우는 없다. 왜일까?
assert(top_of_path != v);
int last_edge = find_edge_in_path(path_index, v);
return max(query_topdown(u, top_of_path),
segment_trees[path_index].query(0, last_edge));
}
// u와 v를 잇는 경로 중 최대값을 반환한다.
int query(int u, int v) {
int t = lca(u, v);
return max(query_topdown(t, u), query_topdown(t, v));
}
int main() {
int cases;
cin >> cases;
while(cases--) {
read_input();
// HLD를 계산한다.
dfs(0);
heavy_light_decomposition(0);
// 각 무거운 경로에 대해 구간 트리를 만들어 둔다.
initialize_trees();
int queries;
cin >> queries;
while(queries--) {
string op;
cin >> op;
if(op == "update") {
int u, v, cost;
cin >> u >> v >> cost;
update(u, v, cost);
}
else {
int u, v;
cin >> u >> v;
cout << query(u, v) << endl;
}
}
}
}'👨💻코드 포스터' 카테고리의 다른 글
| 코테 준비 알고리즘 - 정렬 (0) | 2021.04.27 |
|---|---|
| 게임 이론(스프라그-그런디 이론) (0) | 2020.04.27 |
| [C++]기댓값 알고리즘 (1) | 2020.02.10 |
본 포스팅은 구종만님의 블로그를 스크랩한 글임을 밝힙니다.
http://theyearlyprophet.com/heavy-light-decomposition.html
Heavy-Light Decomposition
Heavy-Light Decomposition @jongman 팔로우하기 트윗하기 [처음으로] [모든 글 보기] [같은 카테고리의 글 보기: 알고리즘] 작년에 1년동안 쉬면서 한 여러 가지 일 중 하나가, 오랜만에 다시 프로그래밍 대회에 참가하는 것이었다. 비록 연습만 열심히 하고 대회에 제대로 참가하진 못했지만, 최근 나온 문제들을 풀어볼 기회가 되어서 좋았다. 최근 문제 출제 경향은 과거에 비해 꽤 바뀌었음을 느꼈는데, 기존에 출제되지 않았던 테크닉들
theyearlyprophet.com
1/28- 코드 구현에는 성공했으나 BOJ에 문제를 제출하지는 못했습니다. 본 구현은 단방향그래프일 경우의 코드지만 제가 연습하고자 하는 BOJ문제들은 모두 양방향그래프를 조건으로 갖추고있어서.. 그냥 단방향을 양방향으로 고치기엔
코드가 무척이나 길고 이해하기힘들고 변수가 많고 까다롭고 그렇습니다. 좀 더 구현 연습을 한 후 저에게 맞는 방식으로 코드를 작성해 나가야겠습니다.
-------------------------------------------------------------------------------------------------------
N개의 정점을 가진 트리가 있다고 하자. 이 때 임의의 두 정점에 대해 이들을 잇는 경로는 O(N)개의 간선을 가진다. Heavy light decomposition은 트리의 간선들을 적절히 일자 경로인 "묶음"들로 잘라, 임의의 두 간선 사이 경로를 O(log N)개의 묶음으로 표현할 수 있게 해 준다. 이것을 세그먼트 트리 등의 일차원 자료 구조와 결합함으로써, 임의의 두 정점 사이의 경로에 대한 연산을 O(log^2N)에 할 수 있다.
개관
간단한 예제 문제를 들어 보자.
-------------------------------------------------------------------------------------------------------
https://algospot.com/judge/problem/read/NAVI
algospot.com :: NAVI
내비게이션 문제 정보 문제 알고스팟 국의 고속도로는 0부터 N-1까지의 번호가 매겨진 N개의 대도시를 연결하고 있다. 이 고속도로망의 가장 큰 특징은 고속도로들이 트리 형태를 갖는다는 것이다. 다시 말하면, 두 도시 간을 연결하는 경로는 항상 정확히 하나만 존재한다. 아래 그림은 13개의 도시를 연결하는 고속도로망의 예를 보여준다. 이 고속도로들은 공익을 위해 건설된 것이기 때문에 통행료가 아주 저렴해서, 고속도로를 한 번 탈 때마다 단 1원의 통행료만을
algospot.com
문제
알고스팟 국의 고속도로는 0부터 N-1까지의 번호가 매겨진 N개의 대도시를 연결하고 있다. 이 고속도로망의 가장 큰 특징은 고속도로들이 트리 형태를 갖는다는 것이다. 다시 말하면, 두 도시 간을 연결하는 경로는 항상 정확히 하나만 존재한다. 아래 그림은 13개의 도시를 연결하는 고속도로망의 예를 보여준다.
이 고속도로들은 공익을 위해 건설된 것이기 때문에 통행료가 아주 저렴해서, 고속도로를 한 번 탈 때마다 단 1원의 통행료만을 내면 된다.
최근 세수가 부족해진 정부는 통행량에 따라 고속도로의 통행료를 동적으로 바꾸는 법안을 상정했다. 이 법안에 따르면, 교통량이 많을 때는 통행료를 올려서 교통량을 낮추는 효과를 볼 수 있다. 그러나 서민들의 거센 반대에 부딪힌 정부는 다음과 같은 타협안을 제시했다: 두 도시 간을 통행할 때는, 지나는 고속도로의 통행료 중 가장 비싼 한 군데의 통행료만을 내도 상관없다는 것이다.
예를 들어 위 그림에서 0번과 1번 도시 사이의 통행료가 10원, 1번과 2번 사이의 통행료가 15원, 2번과 3번 사이의 통행료가 7원이라면, 0번에서 3번까지 갈 때는 15원의 통행료만을 내면 된다.
서민들의 반대는 잦아들고 모두가 행복한 듯 했지만, 알고스팟 국에서 가장 잘 나가는 내비게이션, 박기사의 서버 개발을 담당하고 있는 대성이는 곤란한 상황에 처했다. 고속도로들의 통행료는 하루에도 수천번씩 바뀔 수 있기 때문에, 두 도시간의 통행료를 계산하기가 훨씬 어려워졌기 때문이다.
박기사의 서버는 통행료 변경 내역을 실시간으로 입력받으며, 중간 중간 두 도시 간의 통행료 계산을 요청받아 반환해야 한다. 이를 계산하는 프로그램을 작성해 대성이를 도와주자.
입력
입력에는 C(<=10)개의 테스트 케이스가 주어진다.
각 테스트 케이스의 첫 줄에는 도시의 수 N(2 <= N <= 50000)이 주어진다. N개의 도시는 트리 형태를 가지고 있으며, 0번 도시가 항상 트리의 루트가 된다.
다음 줄에는 N개의 정수로, 0번부터 N-1번까지 각 도시에 대해 부모 도시의 번호가 주어진다. 0번 도시는 루트이므로 부모 도시의 번호 대신 -1이 주어진다. 초기에 모든 고속도로의 통행료는 1원이다.
다음 줄에는 연산의 수 Q (1 <= Q <= 10,000)이 주어진다. 그 후 Q줄에 하나씩 연산이 주어지는데, 연산은 다음 두 형태 중 하나이다:
- update a b cost: a도시와 b도시를 연결하는 고속도로의 통행료를 cost원으로 갱신한다. (0 <= a, b < N, 1 <= cost <= 230)
- query a b: a도시와 b도시 간의 통행료를 계산하라.
출력
각 테스트 케이스마다, query 연산의 결과 통행료들을 모두 계산해 그들의 xor를 한 줄에 출력한다.
-------------------------------------------------------------------------------------------------------
가중치 간선을 갖는 트리가 있다. 문제는 다음의 두 가지 연산을 구현하는 것이다.
(이 문제는 여기에서 채점받을 수 있다.)
- Update(u, v, cost): 간선 (u, v) 의 가중치를 cost로 갱신한다.
- Query(u, v): 두 정점을 잇는 경로에 포함된 간선 중 최대 가중치를 반환한다.
이것을 구현하는 가장 간단한 방법은, Query가 호출될 때마다 두 정점 사이의 경로를 따라 걸으며 만나는 가중치의 최대값을 구하는 것이다. 두 정점 u, v사이의 경로는 두 정점의 LCA(최소 공통 조상, least common ancestor)로 올라가는 두 개의 경로로 분할할 수 있으므로, 다음과 같이 간단히 구현할 수 있다:
int parent[MAXN]; // 부모 정점의 번호. 루트라면 -1
int weight[MAXN]; // 부모 정점으로 가는 간선의 가중치
// u와 v의 최소 공통 조상(least common ancestor)을 반환한다.
int lca(int u, int v) {
...
}
// 간선 (u,v)의 가중치를 cost로 갱신한다.
void update(int u, int v, int cost) {
if(parent[u] == v) swap(u, v);
assert(parent[v] == u);
weight[v] = cost;
}
// u와 v를 잇는 간선 중 최대 가중치를 반환한다.
int query(int u, int v) {
int max_weight = -1;
int t = lca(u, v);
while(u != t) { max_weight = max(max_weight, weight[u]); u = parent[u]; }
while(v != t) { max_weight = max(max_weight, weight[v]); v = parent[v]; }
return max_weight;
}update()는 상수 시간에 동작한다. 그렇다면 query()의 시간 복잡도는 얼마일까? query()는 두 정점에서 LCA까지 가는 경로를 걸어 올라가므로, 시간 복잡도는 두 정점의 깊이에 비례한다고 하겠다. 허나 트리가 브랜치 하나 일렬로 쭉 늘어서 있다면 깊이는 $O(N)$이 된다. 이 문제의 제약 조건에서는 이것은 너무 느리다. 어떻게 하면 좋을까?
간선 분류
우리의 목적은 트리의 간선을 무거운 간선과 가벼운 간선으로 나누는 것이다. 무거운 간선이란 무엇일까? 한 정점의 무게를 해당 정점을 루트로 하는 서브트리에 속한 정점의 수라고 하자. 부모 u에서 자식 v로 가는 간선이 있을 때, v의 무게가 u의 절반 이상이라면 이 간선은 무거운 간선, 이외의 경우는 가벼운 간선이 된다.
아까 링크했던 문제의 예제 데이터를 그림으로 그리면 아래와 같다.
각 서브트리의 무게를 구하고, 무거운 간선을 굵은 선으로 표현하면 다음과 같다.
(이제 각 정점에는 해당 정점의 무게가 표시되어 있다는 점에 유의하자.) 몇 가지 사실을 눈치챌 수 있다:
- 사실 1: 한 정점에서 자손으로 내려가는 무거운 간선이 두개일 수는 없다. 두 자손의 무게가 각각 절반 이상이라면 모순이 되기 때문이다. (만약 자손이 둘 있는데 이들의 무게가 N으로 같다고 하더라도, 부모의 무게는 2N+1이므로 절반이 될 수 없다.)
- 사실 2: 가벼운 간선을 따라 부모에서 자식으로 내려가면 노드의 무게는 항상 절반 이상 줄어든다. 노드의 무게는 항상 1 이상이기 때문에, 따라서 루트에서 잎으로 가는 어떤 경로에도 가벼운 간선은 너무 많을 수 없다. 정확하게는 가벼운 간선의 수는 $O(\lg N)$개라는 것을 알 수 있다. 이 사실은 잠시 후 1차원 배열의 개수를 찾는 데 유용하게 쓰인다.
트리 분해
간선을 분류하고 나면, 트리의 간선들을 여러 개의 묶음으로 분해할 수 있다. 우선 인접한 무거운 간선들을 하나로 묶자. 이렇게 묶은 결과를 "무거운" 경로라고 부르자. 위에서 언급한 사실1에 의해, 이 결과는 항상 1자 경로가 된다. 위 그림에서 각 무거운 경로를 다음과 같이 구분할 수 있다.
엄밀히 정의에는 어긋나지만, 편의상 무거운 경로의 맨 윗 정점에서 그 부모로 올라가는 간선들도 해당 무거운 경로에 포함시키기로 하자. 무거운 간선에 인접하지 않은 정점은 길이가 0인 경로라고 가정하면, 모든 간선이 정확히 하나의 무거운 경로에 포함되도록 할 수 있다. 다음 그림이 이와 같은 분해 결과를 보여준다.
파란색과 녹색 무거운 경로의 최상위 정점에서 위로 올라가는 간선들이 각각 파란색과 녹색으로 색칠된 것에 유의하자. 그러면 모든 간선은 이제 정확히 하나의 무거운 경로에 속한다.
이제 각 무거운 경로들을 잘라내 일렬로 펼쳐 보자. 아래 그림을 얻을 수 있다.
이 때 임의의 두 정점 u, v를 잇는 경로는 이 무거운 경로들의 일부들을 모아 표현할 수 있다. 예를 들어
이 그림에서 분홍색으로 표시된 두 정점 간의 경로는 파란색 경로의 일부와 초록색 경로의 일부, 그리고 하늘색 경로를 모아 표현할 수 있다.
이 때 임의의 두 정점 u, v를 잇는 경로에는 몇 개의 무거운 경로가 포함될까? u, v의 최소 공통 조상이 t라고 하자. t에서 u로 트리를 따라 내려가다 보면, 무거운 경로가 끊어지는 것은 가벼운 간선을 만날 때 뿐이다. 그런데 위에서 언급한 사실2에 의해, 가벼운 간선은 lg N개 이상 만날 수 없다. 따라서 u-v를 잇는 경로 상에 있는 무거운 경로의 수는 최대 2lg N라는 사실을 알게 된다.
HLD로 문제 풀기
이 점을 깨닫고 나면 앞에서 제시한 문제를 어떻게 풀어야 할지 알 수 있다. 먼저 트리를 무거운 경로들의 집합으로 쪼갠다. 각 무거운 경로들은 1자 경로이니, 각 경로마다 하나의 구간 트리를 만들어 각 간선의 가중치를 저장한다. 그러면 이 문제에서 지원해야 하는 두 개의 연산들을 다음과 같이 수행할 수 있다.
- Update 연산: 해당 간선이 포함된 무거운 경로를 찾고, 이 경로에서 해당 간선이 몇 번째로 오는지를 찾아낸다. 그리고 나면 해당 무거운 경로를 표현하는 구간 트리의 해당 원소를 갱신해 주면 된다.
- Query 연산: 두 정점을 잇는 경로를 무거운 경로의 조각들로 쪼갠다. 이 조각들은 이렇게 생겼을 것이다: [무거운 경로 번호, 경로 내에서 첫 번째 간선의 번호, 경로 내에서 마지막 간선의 번호]. 조각들을 순회하며 만들어 둔 구간 트리를 이용해 해당 조각의 최대치를 찾고, 이 중 최대치를 반환한다.
HLD 계산하기
HLD 결과를 어떻게 저장해야 할까? 다양한 방법이 있겠지만, 여기에서 제공하는 예제 구현은 트리가 주어질 때 다음과 같은 값들을 계산한다.
- 각 정점의 깊이와, 해당 정점을 루트로 하는 서브트리의 크기
- 무거운 경로의 목록: 각 무거운 경로마다, 경로에 포함된 정점들의 목록을 트리의 위쪽에서부터 저장한다.
- 각 정점에 대해, 부모로 가는 간선이 속한 무거운 경로의 번호
이것을 다음과 같이 선언할 수 있다.
// 입력으로 주어지는 값들
// ======================
int n; // 정점의 수
int parent[MAXN]; // 각 정점에 대해 부모의 번호를 저장한다. 루트는 -1
vector<int> children[MAXN]; // 각 정점마다 자식 정점의 목록을 저장한다.
// HLD가 계산하는 값들
// ===================
int subtree_size[MAXN]; // 해당 정점을 루트로 하는 서브트리의 크기 (= 정점의 무게)
int depth[MAXN]; // 트리에서 해당 정점의 깊이. 루트의 깊이는 0.
// 각 무거운 경로마다, 경로에 포함된 정점의 목록. 무거운 경로 맨 위에서 그
// 선조로 가는 가벼운 간선을 포함한다.
vector<vector<int> > heavy_paths;
// 이 정점에서 부모로 가는 간선을 포함된 무거운 경로의 번호.
// heavy_paths 내에서의 인덱스를 가리킨다.
vector<int> heavy_path_index;임의의 간선을 가리키기 위해 두 정점 중 자손의 번호를 사용한다는 데 유의하자. 부모에서 자손으로 가는 간선은 여러 개가 있을 수 있지만, 한 자손에서 부모로 가는 간선의 번호는 유일하기 때문에 자손의 번호를 이용하면 간선과 1:1 관계를 쉽게 유지할 수 있다.
HLD를 계산하는 간단한 방법은 루트에서 시작해 너비 우선 탐색을 하며, 각 경로를 만들어 나가는 것이다. 너비 우선 탐색이 정점을 방문할 때마다, 이 정점에서 부모로 올라가는 간선을 어디에 추가할지를 결정하면 된다. 이 간선이 무겁다면, 부모에서 끝나는 무거운 경로의 맨 뒤에 추가해 주면 되고, 가볍다면 이 간선에서 시작하는 무거운 경로를 새로 만들면 된다. 이와 같은 구현을 다음 코드에서 볼 수 있다.
// depth[]와 subtree_size[]는 이미 계산되어 있다고 가정한다.
void heavy_light_decomposition(int root) {
// 초기화
heavy_paths.clear();
heavy_path_index.resize(n, -1);
// 너비 우선 탐색을 하며 heavy_paths와 heavy_path_index를 계산한다.
queue<int> q;
q.push(root);
while(!q.empty()) {
int here = q.front();
q.pop();
for(int child: children[here])
q.push(child);
// here에서 자신의 부모로 올라가는 간선을 적절한 heavy_paths에 추가하자.
// 우선 here가 트리의 루트라 부모로 올라가는 간선이 없는 경우는 무시한다.
if(here == root) continue;
int p = parent[here];
// here에서 p로 올라가는 간선은 어떤 heavy_paths에 들어가야 할까?
if(subtree_size[here] * 2 >= subtree_size[p] && p != root) {
// 1. 이 간선이 무겁다면, 부모에서 끝나는 무거운 경로의 맨 끝에 들어간다.
// (예외: 부모가 루트인 경우에는 부모에서 끝나는 무거운 경로가 아직
// 없으므로 새 무거운 경로를 만들어야 한다.)
int parent_path_index = heavy_path_index[p];
heavy_paths[parent_path_index].push_back(here);
heavy_path_index[here] = parent_path_index;
}
else {
// 2. 이 간선이 가볍다면, 이 간선으로 시작하는 새 무거운 경로를 만든다.
heavy_path_index[here] = heavy_paths.size();
heavy_paths.push_back(vector<int>(2));
heavy_paths.back()[0] = p;
heavy_paths.back()[1] = here;
}
}
}구간 트리 만들기
이렇게 트리를 무거운 경로들로 분리하고 나면, 각 경로를 순회하며 각 경로에 포함된 간선의 길이에 해당하는 구간 트리를 만든다.
// 각 무거운 경로에 해당하는 구간 트리. segment_trees[i]는 heavy_paths[i]에
// 대응된다.
vector<SegmentTree> segment_trees;
void initialize_trees() {
segment_trees.clear();
segment_trees.reserve(heavy_paths.size());
// 각 무거운 경로마다 구간 트리를 만들고 모든 간선에 대해 값을 1로 지정한다.
for(const auto& path: heavy_paths) {
// 경로에 포함된 정점의 개수가 m개일 때, 간선의 개수는 m-1개이다.
int m = path.size();
segment_trees.push_back(SegmentTree(m - 1));
for(int i = 0; i < m-1; ++i)
segment_trees.back().update(i, 1);
}
}Update 연산의 구현
Update 연산을 구현하는 것은 간단하다. 우선 해당 간선이 포함된 무거운 경로의 번호를 찾고, 경로 내에서 이 간선이 몇 번째인지 찾는다. 우리는 경로 중 가장 위에 있는 간선을 0번으로 하고, 아래로 내려오며 번호를 매기기로 하자. 이렇게 하면 경로 중 가장 위에 있는 정점의 깊이를 이용해 쉽게 간선의 번호를 얻고, 구간 트리를 업데이트할 수 있다.
// v에서 그 부모로 올라가는 간선은 이 무거운 경로에서 몇 번째의 간선일까?
// 이 경로의 맨 위에 있는 정점의 깊이와 부모의 깊이를 비교하면 쉽게 알 수 있다.
int find_edge_in_path(int path_index, int v) {
int top_of_path = heavy_paths[path_index][0];
return depth[parent[v]] - depth[top_of_path];
}
void update(int u, int v, int cost) {
// 항상 u가 v의 부모이도록 하자.
if(parent[u] == v) swap(u, v);
assert(parent[v] == u);
// (u,v) 가 속한 경로의 번호는?
int path_index = heavy_path_index[v];
// (u,v)는 이 경로에서 몇 번째 간선일까?
int index_in_path = find_edge_in_path(path_index, v);
// 이 경로에 대응되는 구간 트리의 해당 원소를 갱신한다.
segment_trees[path_index].update(index_in_path, cost);
}
Query 연산의 구현
흥미로운 부분은 Query 연산이다. 우선 구현을 간단하게 하기 위해, u와 v 사이의 경로를 최소 공통 선조 t에서 쪼개자. 그리고 각각의 조각들에 대해 계산한 뒤 최대치를 구하면, 실제로 구현할 때는 항상 한 정점이 다른 정점의 조상이라고 가정하고 코드를 짤 수 있다.
아래 코드에서 query는 두 정점의 최소 공통 선조 t를 구한 뒤, query_topdown을 이용해 두 경로 u~t와 t~v의 최대치를 각각 찾는다.
// u와 v를 잇는 경로 중 최대값을 반환한다.
int query(int u, int v) {
int t = lca(u, v);
return max(query_topdown(t, u), query_topdown(t, v));
}query_topdown은 어떻게 구현할까? 만약 이 두 정점 사이의 경로가 하나의 무거운 경로로 구성되어 있다면 구간 트리를 이용해 간단히 답을 구할 수 있을 것이다. 이외의 경우에는, v에서 u를 만날 때까지 트리를 따라 올라가며 최대치를 찾는다. 이 때, 물론 한 칸씩 올라가는 것이 아니라, 한 번마다 무거운 경로를 하나씩 떼어낸다. v에서 parent[v]로 올라가는 것이 아니라, 이 간선이 속한 무거운 경로의 맨 윗점으로 올라가는 것을 반복하면 된다. 물론 이 때, 구간 트리를 이용해 떼어낸 부분 중의 최대치를 구할 수 있다.
// u에서 v로 내려가는 경로 중 최대값을 반환한다.
int query_topdown(int u, int v) {
// u와 v가 같다면 경로에는 아무 간선도 포함되어 있지 않다.
if(u == v) return -1;
// 만약 u와 v가 같은 무거운 경로에 속한다면 구간 트리로 해결 가능
if(heavy_path_index[u] == heavy_path_index[v]) {
int path_index = heavy_path_index[u];
// u에서 그 부모로 올라가는 간선은 [u,v] 구간에 포함되지 않고,
// 그 다음 간선부터 포함되므로 first_edge에 1을 더해 준다.
int first_edge = find_edge_in_path(path_index, u) + 1;
int last_edge = find_edge_in_path(path_index, v);
return segment_trees[path_index].query(first_edge, last_edge);
}
// v에서 부모로 올라가는 간선이 포함된 무거운 경로의 맨 위 정점까지 올라간다.
int path_index = heavy_path_index[v];
int top_of_path = heavy_paths[path_index][0];
// v == top_of_path 인 경우는 없다. 왜일까?
assert(top_of_path != v);
int last_edge = find_edge_in_path(path_index, v);
return max(query_topdown(u, top_of_path),
segment_trees[path_index].query(0, last_edge));
}
위 코드는 무거운 경로를 하나 떼낸 뒤, 남는 부분의 최대치를 구하기 위해 재귀호출을 이용한다.
최소 공통 조상 찾기
query는 내부적으로 두 정점의 최소 공통 조상을 반환하는 함수인 lca()를 반환한다. 이 함수를 구현하는 방법에는 여러 가지가 있지만, 그 중 비교적 간단한 것은 다음과 같은 배열을 이용하는 것이다.
exp_ancestor[i][j] = 정점 $i$에서 부모로 가는 연결을 2^j번 따라갔을 때 만나는 정점의 번호
이 배열은 깊이 우선 탐색을 하면서 간단히 계산할 수 있고, 이를 이용하면 O(lg N) 시간만에 두 정점의 최소 공통 조상을 찾을 수 있다. 자세한 것은 아래 소스 코드를 참조하자.
시간 복잡도 분석
임의의 두 정점 사이의 경로는 O(lg N)개의 무거운 경로들로 나눠질 수 있다. 각 경로에 대해 구간 트리의 연산은 전부 O(lg N)의 시간이 걸리므로, 모든 구간 트리에 대해 연산하는 시간은 O(lg^2)이 된다.
전체 소스 코드
다음은 이 문제를 해결하는 예제 C++ 코드이다.
using namespace std;
struct SegmentTree {
struct SegmentTreeNode {
int first, last; // 이 노드가 덮는 구간은 [first, last]이다.
int max_value; // 이 구간의 최대값
SegmentTreeNode *left, *right;
SegmentTreeNode(int first, int last): first(first), last(last), max_value(-1) {
if(first != last) {
int mid = (first + last) / 2;
left = new SegmentTreeNode(first, mid);
right = new SegmentTreeNode(mid+1, last);
}
}
void update(int pos, int value) {
// 터미널 노드인 경우 값을 바로 업데이트
if(first == last)
max_value = value;
// 아닌 경우 적절한 가지에 값을 전파하고 구간 최대값을 업데이트
else {
if(pos <= (first + last) / 2)
left->update(pos, value);
else
right->update(pos, value);
max_value = max(left->max_value, right->max_value);
}
}
int query(int lo, int hi) {
// [lo,hi]와 [first,last]의 교집합이 없는 경우
if(hi < first || last < lo) return -1;
// [lo,hi]가 [first,last]를 포함하는 경우
if(lo <= first && last <= hi) return max_value;
// 이외의 경우 각각 나눠 최대값 찾고, 최대치를 반환
return max(left->query(lo, hi), right->query(lo, hi));
}
};
SegmentTreeNode* root;
SegmentTree(int n): root(new SegmentTreeNode(0, n-1)) { }
// pos위치의 값을 value로 바꾼다.
void update(int pos, int value) { root->update(pos, value); }
// [lo, hi] 범위의 값 중 최대값을 구한다.
int query(int lo, int hi) { return root->query(lo, hi); }
};
const int MAXN = 50000;
// 입력으로 주어지는 값들
// ======================
int n; // 정점의 수
int parent[MAXN]; // 각 정점에 대해 부모의 번호를 저장한다. 루트는 -1
vector<int> children[MAXN]; // 각 정점마다 자식 정점의 목록을 저장한다.
// HLD가 계산하는 값들
// ===================
int subtree_size[MAXN]; // 해당 정점을 루트로 하는 서브트리의 크기 (= 정점의 무게)
int depth[MAXN]; // 트리에서 해당 정점의 깊이. 루트의 깊이는 0.
// 각 무거운 경로마다, 경로에 포함된 정점의 목록. 무거운 경로 맨 위에서 그
// 선조로 가는 가벼운 간선을 포함한다.
vector<vector<int> > heavy_paths;
// 이 정점에서 부모로 가는 간선을 포함된 무거운 경로의 번호.
// heavy_paths[] 의 인덱스를 가리킨다.
vector<int> heavy_path_index;
// exp_ancestor[i][j] = i에서 부모로 가는 간선을 2^j번 따라갔을 때 나오는 정점의
// 번호. lca() 를 위해 계산해 둔다.
vector<int> exp_ancestor[MAXN];
// 문제를 풀기 위해 계산하는 값들
// ==============================
// 각 무거운 경로에 해당하는 구간 트리. segment_trees[i]는 heavy_paths[i]에
// 대응된다.
vector<SegmentTree> segment_trees;
// HLD의 구현
// ==========
void dfs(int here) {
subtree_size[here] = 1;
// exp_ancestor[here]를 계산한다.
exp_ancestor[here] = vector<int>(1, parent[here]);
for(int log_jump = 0; ; ++log_jump) {
// 2^log_jump번 올라가 만난 정점
int arrived = exp_ancestor[here][log_jump];
// 2^log_jump번 더 올라갈 수 없다면 종료
if(exp_ancestor[arrived].size() <= log_jump) break;
// 여기서 2^log_jump번 더 올라가면 2^(log_jump+1)번 올라간 셈이 된다.
int next = exp_ancestor[arrived][log_jump];
exp_ancestor[here].push_back(next);
}
for(int child: children[here]) {
depth[child] = depth[here] + 1;
dfs(child);
subtree_size[here] += subtree_size[child];
}
}
// depth[]와 subtree_size[]는 이미 계산되어 있다고 가정한다.
void heavy_light_decomposition(int root) {
// 초기화
heavy_paths.clear();
heavy_path_index.resize(n, -1);
// 너비 우선 탐색을 하며 heavy_paths와 heavy_path_index를 계산한다.
queue<int> q;
q.push(root);
while(!q.empty()) {
int here = q.front();
q.pop();
for(int child: children[here])
q.push(child);
// here에서 자신의 부모로 올라가는 간선을 적절한 heavy_paths에 추가하자.
// 우선 here가 트리의 루트라 부모로 올라가는 간선이 없는 경우는 무시한다.
if(here == root) continue;
int p = parent[here];
// here에서 p로 올라가는 간선은 어떤 heavy_paths에 들어가야 할까?
if(subtree_size[here] * 2 >= subtree_size[p] && p != root) {
// 1. 이 간선이 무겁다면, 부모에서 끝나는 무거운 경로의 맨 끝에 들어간다.
// (예외: 부모가 루트인 경우에는 부모에서 끝나는 무거운 경로가 아직
// 없으므로 새 무거운 경로를 만들어야 한다.)
int parent_path_index = heavy_path_index[p];
heavy_paths[parent_path_index].push_back(here);
heavy_path_index[here] = parent_path_index;
}
else {
// 2. 이 간선이 가볍다면, 이 간선으로 시작하는 새 무거운 경로를 만든다.
heavy_path_index[here] = heavy_paths.size();
heavy_paths.push_back(vector<int>(2));
heavy_paths.back()[0] = p;
heavy_paths.back()[1] = here;
}
}
}
void initialize_trees() {
segment_trees.clear();
segment_trees.reserve(heavy_paths.size());
// 각 무거운 경로마다 구간 트리를 만들고 모든 간선에 대해 값을 1로 지정한다.
for(const auto& path: heavy_paths) {
// 경로에 포함된 정점의 개수가 m개일 때, 간선의 개수는 m-1개이다.
int m = path.size();
segment_trees.push_back(SegmentTree(m - 1));
for(int i = 0; i < m-1; ++i)
segment_trees.back().update(i, 1);
}
}
int lca(int u, int v) {
// 편의를 위해, u와 v의 깊이가 같거나 v가 더 아래 있다고 가정한다.
if(depth[u] > depth[v]) swap(u, v);
// 우선 u와 v의 깊이가 다르면 같아질 때까지 v를 올린다.
int diff = depth[v] - depth[u];
for(int i = 0; (1<<i) <= diff; ++i)
if(diff & (1<<i))
v = exp_ancestor[v][i];
// 만약 이 때 u == v라면 u가 v의 선조.
if(u == v) return u;
// u와 v가 같아지지 않는 한도 내에서 최대한 위로 올라간다.
for(int i = exp_ancestor[u].size()-1; i >= 0; --i)
if(i < exp_ancestor[u].size() && exp_ancestor[u][i] != exp_ancestor[v][i]) {
u = exp_ancestor[u][i];
v = exp_ancestor[v][i];
}
// 위 루프가 종료하면 u와 v는 LCA 바로 아래 위치하게 된다.
return exp_ancestor[u][0];
}
void read_input() {
for(int i = 0; i < MAXN; ++i) children[i].clear();
cin >> n;
for(int here = 0; here < n; ++here) {
int par;
cin >> par;
parent[here] = par;
if(par != -1) children[par].push_back(here);
}
}
// v에서 그 부모로 올라가는 간선은 이 무거운 경로에서 몇 번째의 간선일까?
// 이 경로의 맨 위에 있는 정점의 깊이와 부모의 깊이를 비교하면 쉽게 알 수 있다.
int find_edge_in_path(int path_index, int v) {
int top_of_path = heavy_paths[path_index][0];
return depth[parent[v]] - depth[top_of_path];
}
void update(int u, int v, int cost) {
// 항상 u가 v의 부모이도록 하자.
if(parent[u] == v) swap(u, v);
assert(parent[v] == u);
// (u,v) 가 속한 경로의 번호는?
int path_index = heavy_path_index[v];
// (u,v)는 이 경로에서 몇 번째 간선일까?
int index_in_path = find_edge_in_path(path_index, v);
// 이 경로에 대응되는 구간 트리의 해당 원소를 갱신한다.
segment_trees[path_index].update(index_in_path, cost);
}
// u에서 v로 내려가는 경로 중 최대값을 반환한다.
int query_topdown(int u, int v) {
// u와 v가 같다면 경로에는 아무 간선도 포함되어 있지 않다.
if(u == v) return -1;
// 만약 u와 v가 같은 무거운 경로에 속한다면 구간 트리로 해결 가능
if(heavy_path_index[u] == heavy_path_index[v]) {
int path_index = heavy_path_index[u];
// u에서 그 부모로 올라가는 간선은 [u,v] 구간에 포함되지 않고,
// 그 다음 간선부터 포함되므로 first_edge에 1을 더해 준다.
int first_edge = find_edge_in_path(path_index, u) + 1;
int last_edge = find_edge_in_path(path_index, v);
return segment_trees[path_index].query(first_edge, last_edge);
}
// v에서 부모로 올라가는 간선이 포함된 무거운 경로의 맨 위 정점까지 올라간다.
int path_index = heavy_path_index[v];
int top_of_path = heavy_paths[path_index][0];
// v == top_of_path 인 경우는 없다. 왜일까?
assert(top_of_path != v);
int last_edge = find_edge_in_path(path_index, v);
return max(query_topdown(u, top_of_path),
segment_trees[path_index].query(0, last_edge));
}
// u와 v를 잇는 경로 중 최대값을 반환한다.
int query(int u, int v) {
int t = lca(u, v);
return max(query_topdown(t, u), query_topdown(t, v));
}
int main() {
int cases;
cin >> cases;
while(cases--) {
read_input();
// HLD를 계산한다.
dfs(0);
heavy_light_decomposition(0);
// 각 무거운 경로에 대해 구간 트리를 만들어 둔다.
initialize_trees();
int queries;
cin >> queries;
while(queries--) {
string op;
cin >> op;
if(op == "update") {
int u, v, cost;
cin >> u >> v >> cost;
update(u, v, cost);
}
else {
int u, v;
cin >> u >> v;
cout << query(u, v) << endl;
}
}
}
}'👨💻코드 포스터' 카테고리의 다른 글
| 코테 준비 알고리즘 - 정렬 (0) | 2021.04.27 |
|---|---|
| 게임 이론(스프라그-그런디 이론) (0) | 2020.04.27 |
| [C++]기댓값 알고리즘 (1) | 2020.02.10 |